SMARS-A Simulated Multimodal Aerial Remote Sensing dataset
SMARS is a large synthetic dataset containing pairs of scenes with simulated urban changes aimed at training and validating change detection applications, as well as urban segmentation and building extraction tasks. We publish this benchmark dataset together with WG I/1 and WG I/3.
In order to cover different contexts, the dataset is modeled on the topography of two European cities: Paris and Venice, resulting in two pairs of scenes named as SParis and SVenice, respectively, with associated orthoimages and Digital Surface Models (DSMs). Changes were simulated between a pre- and a post-scenario, where the latter has an overall larger number of buildings and reduced green areas, with the additional simulation of some demolished buildings. In order to increase the resemblance to real data, the input images were further processed to orthophotos and digital elevation models by a conventional photogrammetric pipeline in order to include different illumination conditions and other effects, such as blurred building boundaries. Reference ground truth maps were directly rendered for the training and validation of change detection, building extraction and urban segmentation tasks. The data have been rendered at two different Ground Sampling Distances (GSD) of 30cm and 50cm. Examples of output images are shown in Fig. 1.
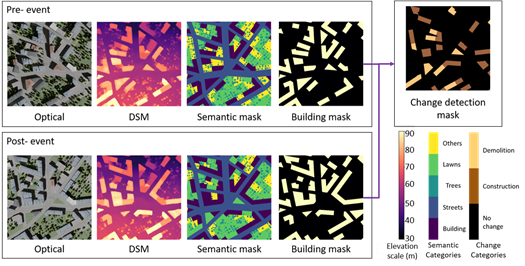
Fig. 1 Available information in pre-and post-events scenarios. For each tile, from left to right: optical image, DSM, semantic and building masks. For the change detection, the difference between the two events is used as ground truth. Scales are given as a reference for the displayed information.
The dataset has a size of 9.0 GB, including rasters in GeoTIFF format for all maps. The optical imagery is rendered in RGB format, and the DSMs are stored with float precision, and ground truth maps as discrete values. For each simulated city and GSD, we provide a total of 27 tiles (3 pre-and post-event optical image tiles, DSMs, building masks, and semantic maps, plus 3 building change detection masks).
The size of both SParis and SVenice rasters with 30cm GSD is 5600 x 5600 pixels. For SParis (Fig. 2) 30% of the coverage is used for training (marked in yellow as P1), 30% for validation (P2), and 40% for testing (P3). Training, validation and testing data are marked in yellow as P1, P2, and P3, respectively. For SVenice (Fig. 3), 50% of the coverage is set as training as it contains a large area of water, belonging to the class "others" (V1, marked in blue), while 15% is used for validation (V2) and 35% (V3) for testing. The footprints of the images with a GSD of 50cm are larger with respect to the ones of 30cm, respectively 4500 x 3560 pixels (SParis) and 5600 x 5600 pixels (SVenice). For all datasets, the training, test and validation tiles at 30 cm GSD are subsets of the respective tiles at 50 cm GSD. In the case of SParis, the splitting boundaries of the 50cm and 30cm are set at the same longitude for all images.
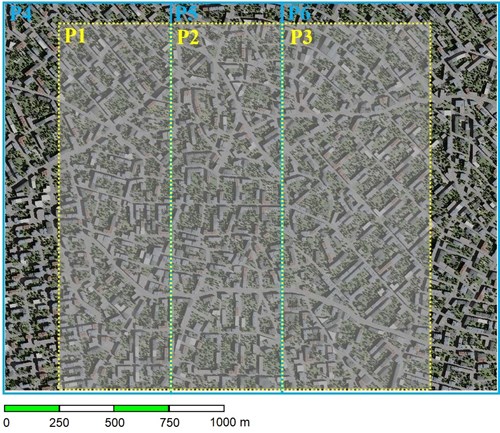
Fig. 2 Layout of the SParis images. Yellow and blue dotted lines represent the splitting of the 30cm resolution (1.68 km x 1.68 km) and 50cm resolution images (2.25 km x 1.78 km), respectively.
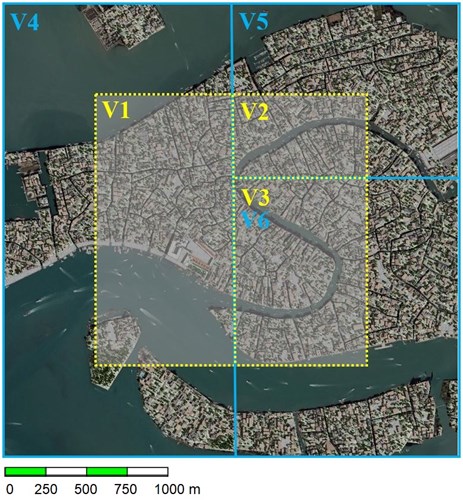
Fig. 3 Layout of the SVenice images. Yellow and blue dotted lines represent the splitting of the 30cm resolution (1.68 km x 1.68 km) and 50cm resolution images (2.8 km x 2.8 km), respectively.
The python code used to split the data for our experiments are also provided and users can customize the codes to their needs (we will publish the code soon).
[Ref] M. Fuentes-Reyes, Y. Xie, X. Yuan, P. d’Angelo, F. Kurz, D. Cerra, J. Tian. “A 2D/3D multimodal data simulation approach with applications on urban semantic segmentation, building extraction and change detection”, in ISPRS Journal of Photogrammetry and Remote Sensing, vol. 205, 2023, pp. 74-97, https://doi.org/10.1016/j.isprsjprs.2023.09.013 .
Dataset can be downloaded from here.
WG I/8



