Image Orientation - data desciption (Dortmund centre)
RELEASE of ALL THE DATA captured within the ISPRS Scientific Initiative "Multi-platform Very High Resolution Photogrammetry" cofunded by EuroSDR (2014-2015)
All the data acquired for the benchmark has been released on both the test areas. You are welcome to use in any activity where it might be helpful. If you intend to use it in a publication please acknowledge the data provision by ISPRS and EuroSDR. Please also refer to the paper:
A more detailed explanation about the complete dataset will be given by mail after having filled the registration form!
_________________________________________________________________________________________________________
This task focuses on the image orientation assessment of different image block configurations. The city center of Dortmund has been considered for this part of the benchmark and different scenarios have been set up for participants. For each scenario a set of images will be delivered together with GCPs object space coordinates. Image coordinates of both GCPs and CPs will be provided, too. The UTM reference system (UTM 32, WGS84), with ellipsoid height values has been adopted as coordinate reference system. No further transformation to a local Euclidean reference system has been intentionally performed. The accuracy of the camera exposure time synchronization is not known. Preliminary experiments revelead that the synchronization might not be sufficient to use rigid camera head constraints in the adjustment.
The evaluation is performed considering the residuals on CPs and the mean deviation of sparse point cloud from reference data (TLS and ALS) on some selected planar surfaces. For further information about the evaluation procedure, please refer to [Nex et al., 2015].
IMAGE SET A - Scenario A) Orientation of large airborne multi-view image blocks: a subset of the complete oblique/nadir image block (1204 images, IGI Pentacam) is delivered: the image block has 300 images with 60% along-track and 60% across-track overlaps.
Together with the images, the set of corresponding GCPs (both image and object space coordinates) and CPs (only image coordinates) is provided as well. The pix4D convention has been adopted to define the image coordinates (see below). GCPs are mainly distributed on the left and right side of the image block (see Figure 1 below) to better evaluate possible remaining systematic errors in the participants bundle solutions.

Figure 1. A schematic representation of GCPs (blue dots) and CPs (yellow dots) distribution. The red dots represent the camera positions (5 images each dot).
Only a truncated version of the image orientation files provided by direct sensor solutions will be provided. Both position and orientation values will be approximated to the closest integer values (i.e. an angle equal to 45.342 will be truncated to 45 and a cartographic coordinate equal to 6312356.45 will be delivered as 6312356). In this way, participants could exploit this rough information to guide their image concatenation and orientation strategies without taking concrete advantage from the direct orientation solution.
Only 8bit images are provided to participants. The 16bit to 8bit transformation has been done by AeroWest using some batch processing, i.e. no individual adaptations were made. Participants could eventually request 16bit images, if necessary. For a more detailed description of the data refer to the dedicated webpage, while for a more complete explanation of the evaluation procedure, please refer to (Nex et al., 2015).
The original camera calibration parameters provided by Aerowest (the company that acquired the data) are reported in interior_calibration.pdf. The GCP and CP image coordinates have been collected using the Pix4D software: for this reason, the geometric schemes of both PentaCam and Pix4D image reference systems configuration are reported in pentacam_configuration.pdf. Note that GCP and CP coordinates are espressed in pixel coordinate system, without any correction of the Principal Point (PP) position. The corresponding Pix4D camera calibration parameters, are recorded in the file camera_calibration.txt as well. This information, however, is only important in case you decide not to perform a self calibration. Please also note that the provided exterior image orientation is according to the camera rotation definition from AeroWest.
The download folder for this Scenario contains the following folders:
Orientation and calibration – reporting all the files relative to:
(i) cameras calibration and detailed schemes (already mentioned above);
(ii) truncated camera position (image_orientation_truncated.txt);
(iii) GCP and CP image coordinates (GPC_CP_2D.csv);
(iv) GCP ground coordinates (GCP_3D.txt).
Photogrammetric_image_block The images relative to each subset are stored in the corresponding folder. Images are grouped in 5 different subfolders according to the used camera.
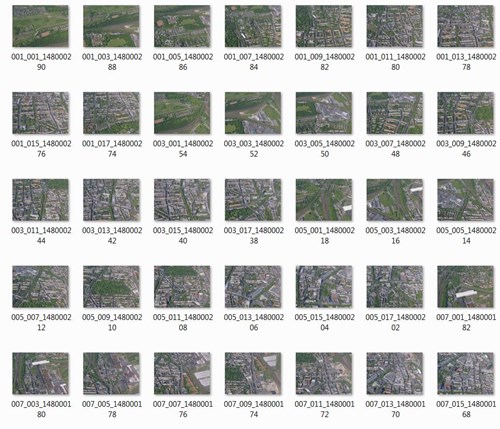
Figure 2. Oblique images
IMAGE SET B - Scenario C) (Scenario B related to image SET A according to Nex at al. (2015) will not be released yet) Image orientation and calibration across UAV and terrestrial platforms: this scenario will only focus on UAV and terrestrial images, not on conventional airborne data. The images in correspondence to the “Rathaus” (city hall) building are provided together with a minimum number of GCPs placed just on one side building and the approximate position given by the onboard GNSS devices. The image coordinates of GCPs and CPs will be provided to the users as well. Images were taken with a Sony Nex7 camera, the same device has been used for both: UAV-based and ground-based acquisition. For a detailed data description see Nex et al., 2015.
Data folder structure (release_information):
(i) GCP and CP image coordinates (GPC_CP_2D.csv);
(ii) GCP ground coordinates (GCP_3D.txt).
(iii) Images (UAV: UAV-based: 146, TERR: ground-based: 204). The initial (GPS, L1-based) camera position is stored in the EXIF header of the images.
The image below shows the approximate locations of cameras (red dots, attention: positions partly heavily affected by errors through GPS signal obstruction and multi path) and the position of GCPs (dark blue crosses), CPs are shown in light blue crosses.
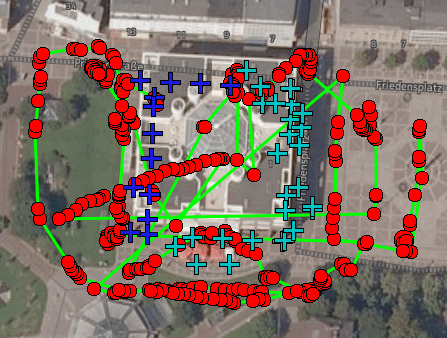
Figure3. A schematic representation of GCPs (blue dots) and CPs (light blue dots) distribution. The red dots represent the camera positions.
Some thumbnails of images are reported below.
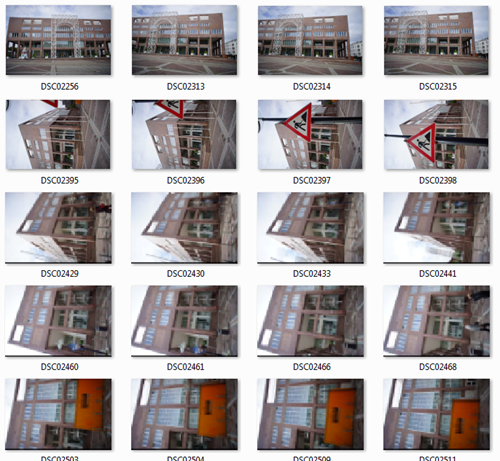
Figure 4. Terrestrial (ground-based) images.
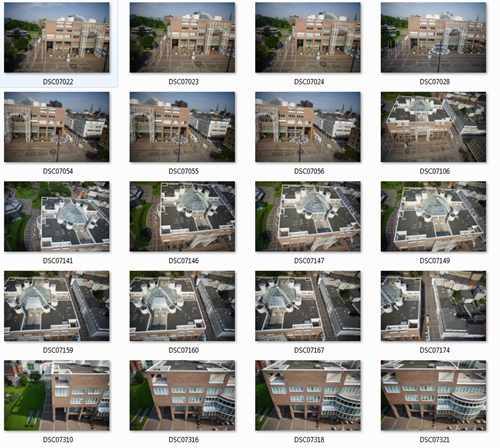
Figure 5. UAV images.
TERM OF USE
The data users should include the following acknowledgement in any publication resulting from the dataset:
"The authors would like to acknowledge the provision of the datasets by ISPRS and EuroSDR, released in conjuction with the ISPRS scientific initiative 2014 and 2015, lead by ISPRS ICWG I/Vb."
ICWG II/Ia





